Learning Linux kernel driver development on the NXP i.MX 6ULL, including implementations for GPIO, PWM, I2C, SPI and sensor integration.
C/C++Embedded LinuxDevice Drivers
An advanced autonomous inspection system for industrial monitoring, developed for TSMC utilizing Boston Dynamics' Spot, featuring multi-map navigation and a digital twin simulation.
ROS2IsaacSimPythonDigital Twin
A collaboration with Foxconn to integrate HHEV.OS into the EVπ autonomous vehicle, enhancing system security and compatibility with ROS2 navigation.
ROS2HHEV.OSDDSPCB Design
An educational project to develop a pangolin-inspired quadruped robot, focusing on modular system design with ROS2 to advance hands-on learning in robotics.
ROS2BiomimeticsMotion Control
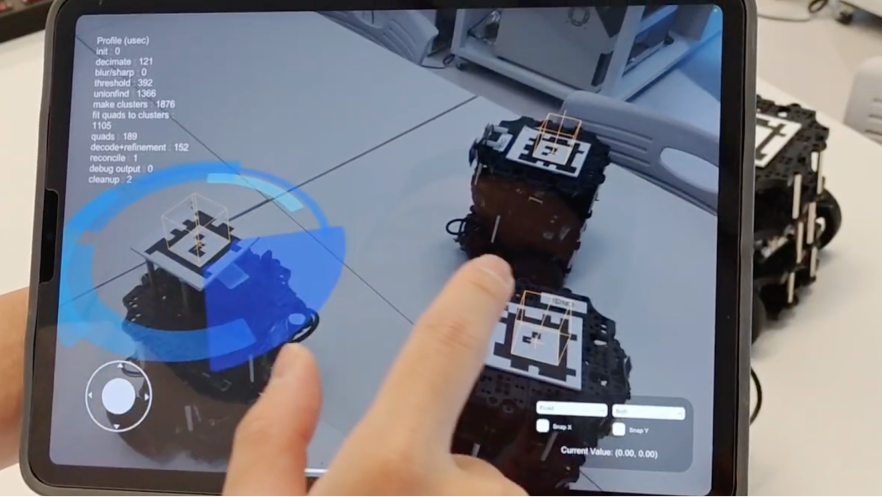
This project enhanced the Triceratops robot's environmental awareness for autonomous indoor mobility by integrating a Realsense D435 depth camera with Nvidia Isaac ROS VSLAM and AprilTag SLAM technologies.
ROS2VSLAMNav2AprilTag
A centralized control interface for ROS2-based devices, enabling efficient multi-robot collaboration and remote management through a web-based application.
ROS2UnityZenohSocket.IO
A comprehensive ROS2-based hexapod robot featuring LiDAR-based mapping, AprilTag tracking, and autonomous navigation, developed during the UROP program at City Science Lab.
ROS2SLAMCartographerAprilTag
A quadcopter UAV project combining advanced flight control with computer vision, designed to tackle complex navigation tasks and demonstrate real-world autonomous flight applications.
ROSMAVROSAirSimComputer Vision
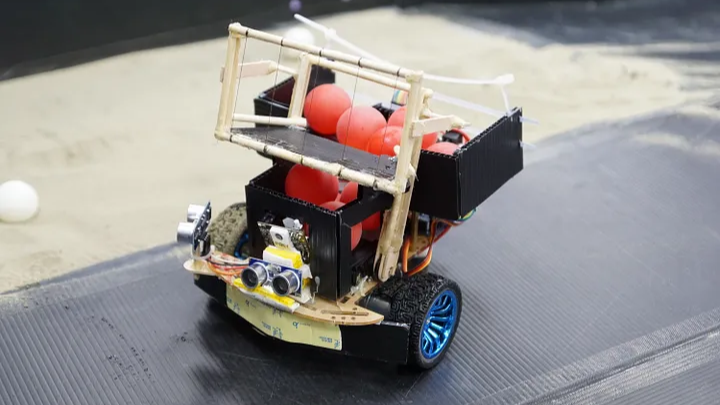
A collaborative project with Osaka Institute of Technology to design and build a self-driving car for an obstacle course competition.
ArduinoC++Computer Vision