Large-Scale Inspection System: Spot
This work presents an advanced inspection system utilizing Boston Dynamics' Spot for autonomous industrial monitoring in collaboration with TSMC. The system integrates a Routing System, Multi-Map navigation, and a digital twin simulation through NVIDIA Isaac Sim to enhance operational efficiency in large-scale environments. By combining these technologies, we establish a scalable, memory-efficient, and highly reliable framework for autonomous industrial inspection.

System Framework
The inspection process begins with user-defined task assignments, which are processed by an intelligent routing system that determines optimal navigation paths. The routing system employs:
- Traveling Salesman Problem (TSP) for single-robot optimization
- Multi-Agent Path Finding (MAPF) for coordinated multi-robot navigation
Once optimal routes are established, the navigation commands are relayed to the multi-map navigation system, which facilitates seamless movement across different factory sections.

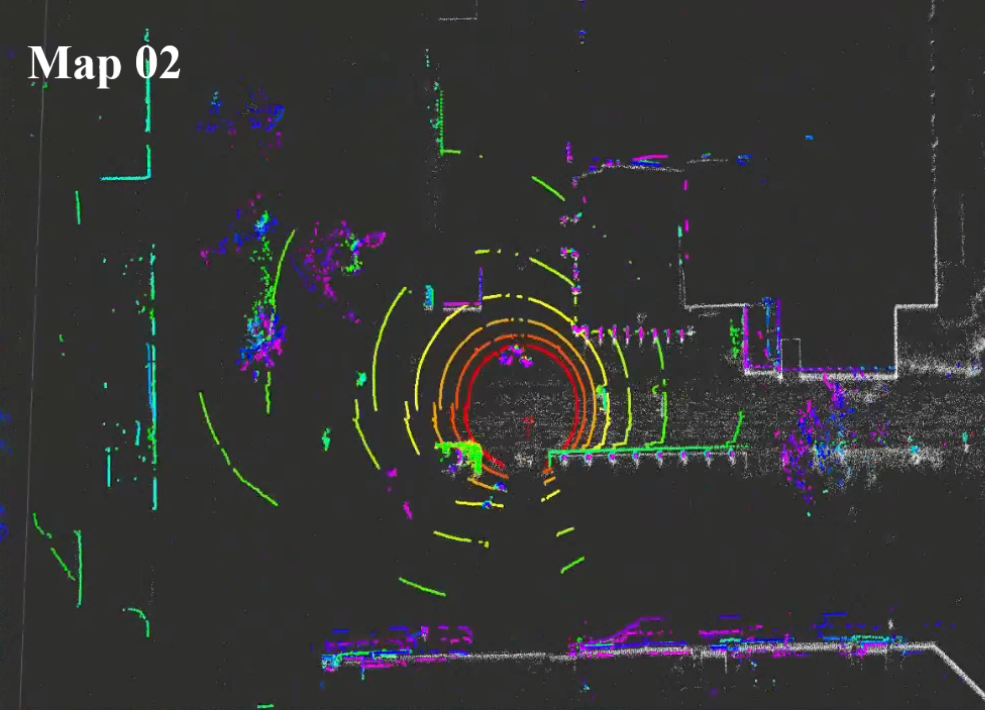
Map Switching System
Large factory environments pose challenges in handling comprehensive maps. To address this, we developed a map-switching system utilizing AprilTag markers as positional reference points. This system:
- Optimizes memory usage by eliminating the need to load an entire large-scale map.
- Enhances scalability, enabling efficient expansion of mapped areas.
- Ensures precise localization, with AprilTags setting Spot’s initial pose after each transition.
By partitioning large spaces into manageable sub-maps and leveraging AprilTag-assisted positioning, we enable reliable and efficient navigation throughout extensive factory environments.
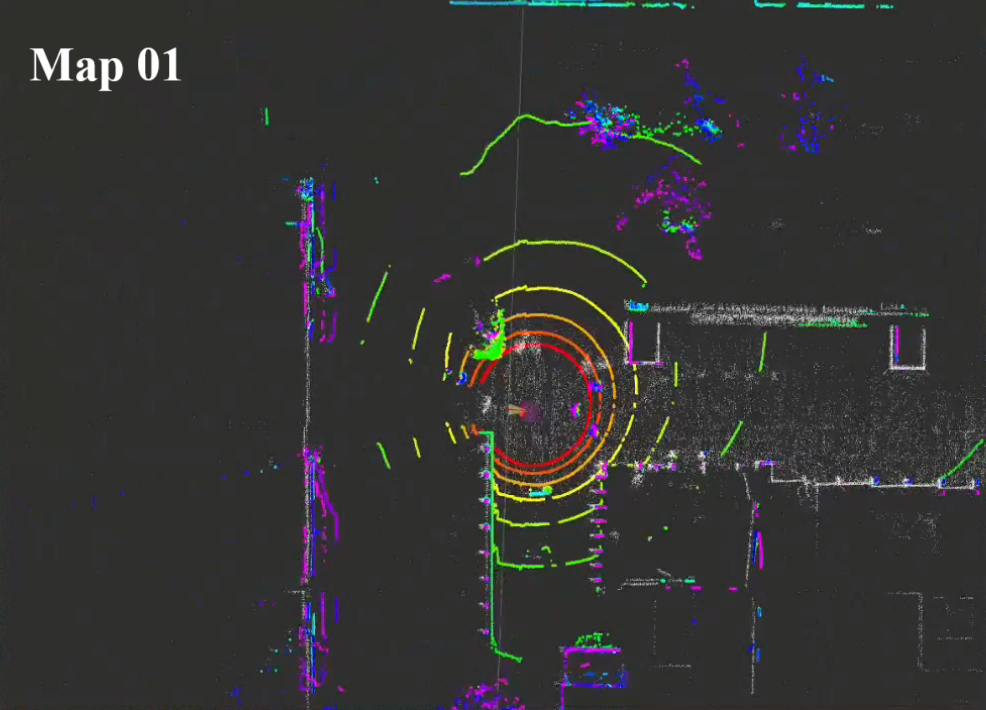

3D LiDAR Localization
Spot employs an onboard 3D LiDAR sensor to continuously scan its surroundings, generating high-resolution point cloud data. This real-time data is cross-referenced with pre-established environmental maps using the 3D Normal Distributions Transform (NDT) algorithm for robust and precise localization.
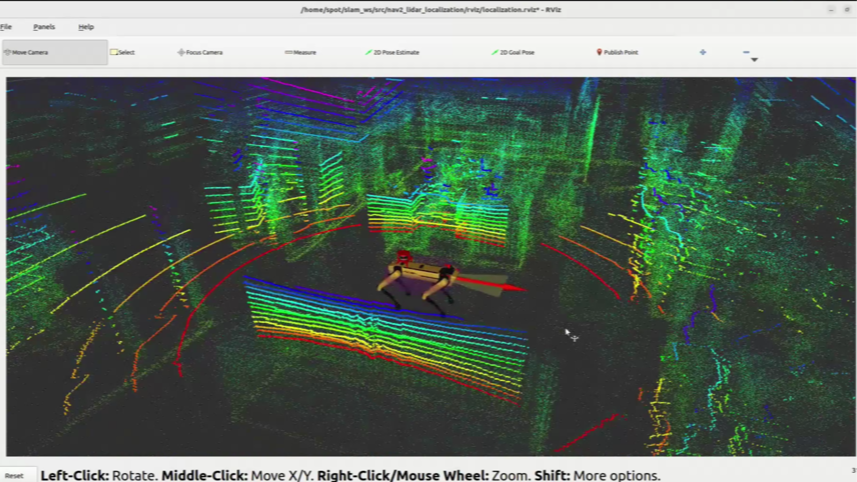
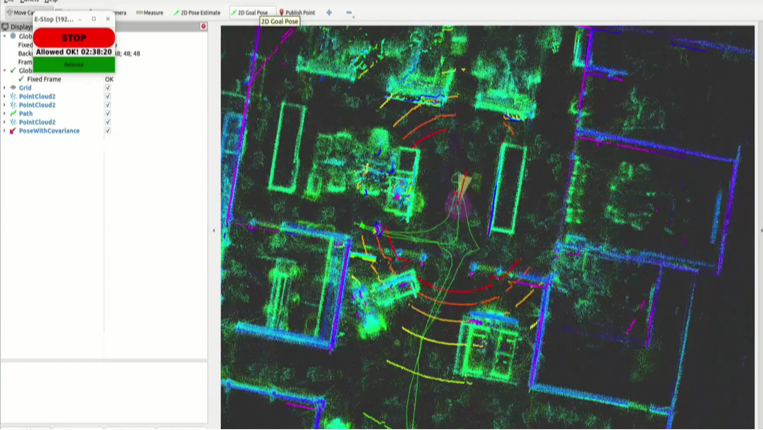
System Testing
Outdoor Testing
Indoor Testing
City Science Lab Omniverse Digital Twin
Beyond physical navigation, Spot has been integrated into a digital twin environment via NVIDIA Isaac Sim. This enables:
- Virtual simulation of navigation scenarios to optimize movement strategies before deployment.
- Real-time visualization of waypoints and routing paths.
- Enhanced predictive analysis, improving operational reliability.

