Undergraduate Project: Autonomous Drone
A quadcopter UAV project that combines advanced flight control with computer vision capabilities, designed to tackle complex navigation tasks and demonstrate real-world applications in autonomous flight.

Project Motivation
Drone applications are expanding rapidly, from entertainment to military and industrial uses. Taiwan’s advantage in drone development stems from its strong ICT industry, providing key components and a mature supply chain. Our research focuses on integrating stable drone flight and image recognition with ROS (Robot Operating System). We aimed to demonstrate our achievements by completing the TDK flying competition course, leveraging Taiwan’s ICT strengths to advance drone technology.
Development Process
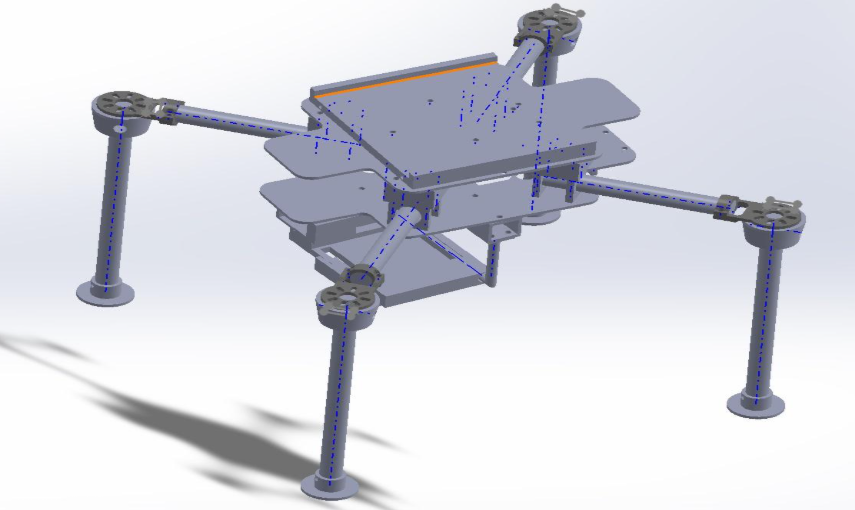
The project development was divided into two main phases:
- Phase 1: Mechanical design, including Solidworks modeling and 3D printing.
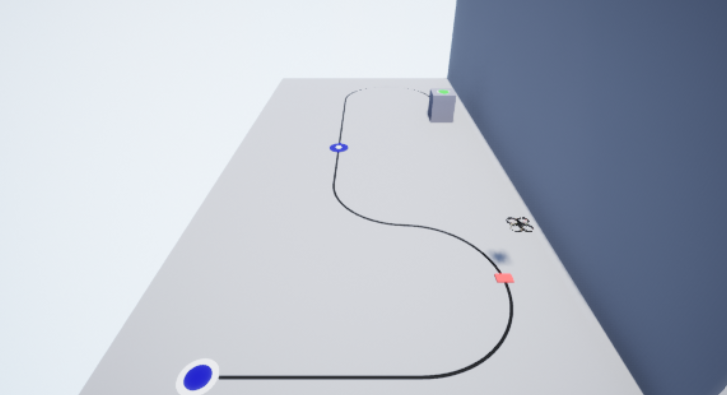
- Phase 2: Programming implementation using ROS, MAVROS, and Airsim for simulation and testing.
Project Achievements
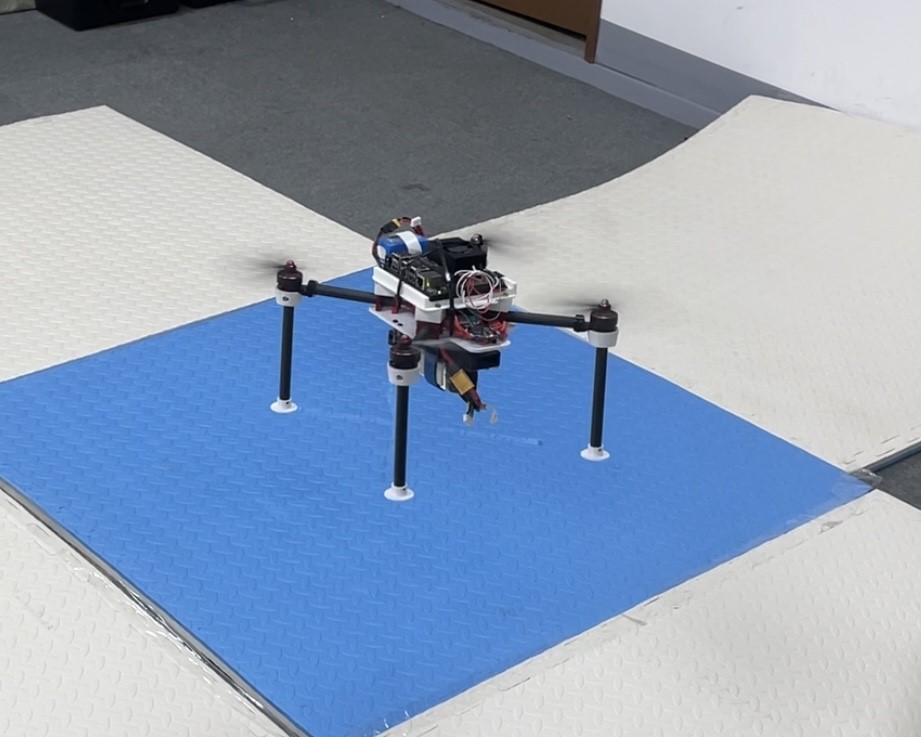
We successfully developed a quadcopter drone with advanced capabilities:
- Hardware Integration: Utilized a Pixhawk 4 Mini flight controller, Jetson Xavier NX, an optical flow sensor, LiDAR, and an IMX219-120 Camera.
- Image Recognition: Employed advanced segmentation techniques to reduce interference from shadows.
- Flight Stability: Enhanced indoor navigation using optical flow and LiDAR for GPS-denied environments.