PBL Competition: Self-Driving Car
A collaborative project between Osaka Institute of Technology, New Taipei Municipal Zhonghe Senior High School, and National Taipei University of Technology.
Competition Rules
The competition field features four obstacle areas at each corner: sand, grass, white rock, and a water area. There is also a high heel area in the center of the field. Competitors must navigate these obstacles while collecting as many red balls as possible.
Tools & Technology
Our system utilizes:
- Vision System: A Pixy camera connected to an Arduino Mega board for automatic image processing and ball detection.
- Motors: Two 12V DC motors for driving and a 7V servo motor for the ball catcher mechanism.
- Sensors: An ultrasonic sensor for wall detection and obstacle avoidance.
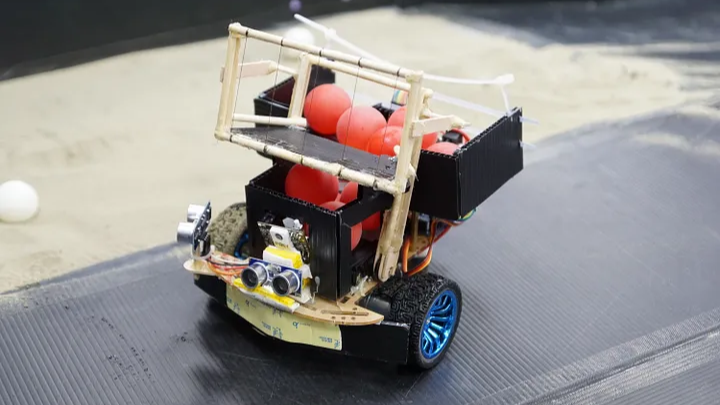
Robot Design
We designed a specialized ball collection system inspired by table tennis ball collectors. The mechanism features a rope-based catcher that efficiently transfers collected red balls to a storage container at the rear of the robot.
Program Flow
Our program operates in three main steps:
- 1. Wall Detection: The ultrasonic sensor monitors wall distance and triggers turning when necessary.
- 2. Ball Tracking: The camera centers on detected red balls through directional adjustments.
- 3. Ball Collection: When a ball is properly aligned (Y-axis > 180 on the camera’s coordinate system), the catcher mechanism activates to collect it.